Brève théorie
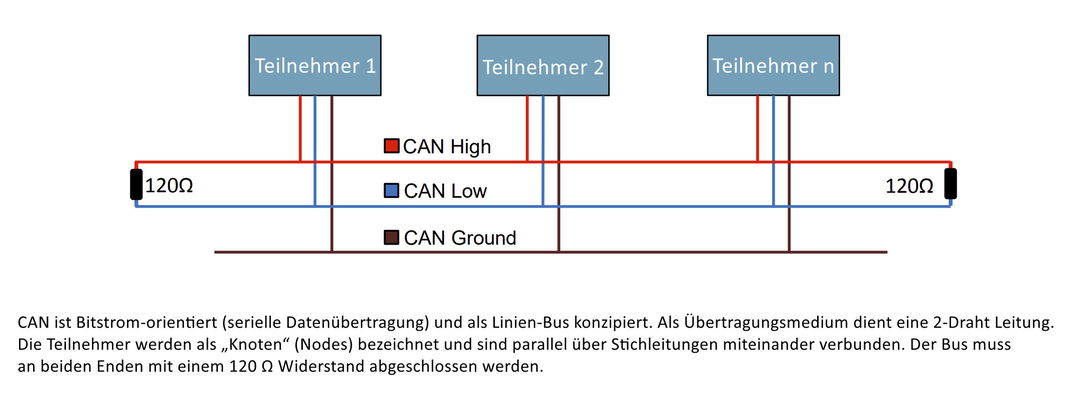
La communication entre les différents composants "intelligents" du Stromer s'effectue via un bus à deux fils. Stromer utilise pour cela le bus CAN. CAN est l'abréviation de Controller Area Network. Ce système de bus sériel a été développé en 1986 par BOSCH spécialement pour l'utilisation dans les voitures. Il est défini comme standard de communication selon la norme ISO 11898-1 et la couche 2 (couche de protection des données) dans le modèle de référence ISO/OSI. Il existe en outre toute une série de protocoles (ISO-TP / CANopen / J1939 etc.).
Des participants (nœuds) sont connectés au bus série, qui peuvent placer des messages sur le bus et récupérer des messages du bus. Un contrôleur CAN gère l'environnement sous-jacent, c'est-à-dire que, par exemple, le contrôleur CAN de la batterie gère la batterie.
L'histoire du bus CAN en bref
- Pre CAN : Les ECU de voiture ont eu recours à un câblage point à point complexe
- 1986: Bosch a développé le protocole CAN comme solution
- 1991: Bosch published CAN 2.0 (CAN 2.0A : 11 bit, 2.0B : 29 bit)
- 1993: CAN est adopté comme norme internationale (ISO 11898)
- 2003: ISO 11898 devient une série standard
- 2012: Bosch a publié le CAN FD 1.0 (taux de données flexible)
- 2015: Le protocole CAN FD est standardisé (ISO 11898-1)
- 2016: La couche physique CAN pour des débits de données jusqu'à 5 Mbit/s standardisés dans ISO 11898-2 (en pratique jusqu'à 8 Mbit/s)
- 2018: Le CiA lance le développement de CAN XL
- 2024: CAN XL standardisé (ISO 11898-1:2024, 11898-2:2024)
Ceux qui souhaitent s'informer un peu peuvent le faire entre autres ici faire.
Composants avec interface CAN
Les composants d'un Stromer avec une interface CAN sont
- le contrôleur (MCU)
- la batterie et le chargeur
- l'éclairage avant Supernova m99 Pro (ST2S, ST5)
- l'ABS de Blubrake
- l'OMNI, la centrale du Stromer
Diagnostic
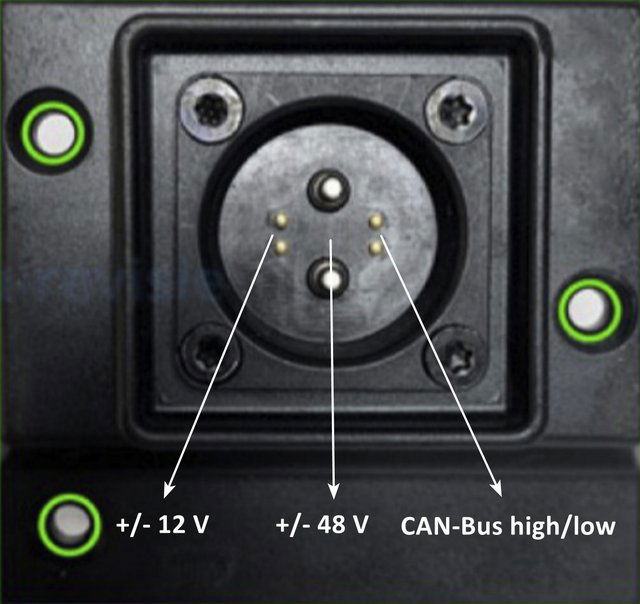
Il est possible de mesurer avec un multimètre si le bus CAN du Stromer présente une erreur fondamentale. Pour ce faire, il suffit de brancher un câble adapté. Câble Wicket à la prise de charge et mesure :
- Régler le multimètre sur le mode de résistance [Ω] et raccorder les lignes de mesure à la ligne CAN-High ou à la ligne CAN-Low. La résistance mesurée doit se situer dans une plage de 60-70 Ω.
- Régler le multimètre sur le mode de mesure de la tension continue (DC) [V] et raccorder les lignes de mesure à la ligne CAN High ou CAN Low ainsi qu'à la masse. La tension mesurée doit être d'environ 2,5 volts sur les deux lignes. Pour CAN-H, il s'agit d'environ 2,4 volts, pour CAN-L d'environ 2,6 volts. Des différences de tension en dehors de cette plage peuvent indiquer un éventuel problème.
La constatation d'une valeur Ω ou d'une valeur de tension correcte ne signifie pas que la communication logicielle est correcte. Il faudrait pour cela raccorder un enregistreur de données et finalement savoir comment interpréter les données. En ce qui concerne les mesures sur le bus CAN, il faut également noter que cette lecture recommandé.

Connexion Rosenberger :